Building a faster OpenCV on Raspberry Pi
When it comes to embedded computer vision, fractions of code acceleration are regarded as a huge success for programmers. Today, I’ll explain how to build a customized OpenCV for Raspberry Pi as one of the most famous single-board computers. By following these simple tips, you’ll experience a 2-3x faster OpenCV on your board.
Raspberry Pi 2 and higher versions have multi-core CPUs that support ARM NEON technology. Clearly, a code that benefits from these two options will run much faster than a simple bare code. The good news is that most OpenCV functions are parallelized on CPU and a limited number of them benefit from NEON C intrinsics. You can check this by digging into some of the source codes (e.g. KLT tracker implementation in opencv/src/modules/video/src/lkpyramid.cpp) and look for parallel_for_and if CV_NEONstatements.
The bad news is that, if you have previously built OpenCV on your board, it is most likely that your library doesn’t benefit from these options. You can simply check by running the following script:
#include
#include
int main()
{
if(cv::getNumThreads()==4 && cv::checkHardwareSupport(CV_CPU_NEON)==1)
std::cout << "OpenCV is optimized" << std::endl;
return 0;
}
If it doesn't print the message, it means that your OpenCV doesn’t support multi-threading and/or NEON vectorization.
1- Uninstall your current OpenCV
To build a customized OpenCV with the mentioned capabilities, you must first delete your current version. If you had installed it via sudo apt install libopencv-dev, just run sudo apt purge libopencv-dev. But if you had installed it from source, you must first go to its build folder and then run:
sudo make uninstall sudo rm -r *
To make sure that your Pi is clean from any OpenCV lib, run the following commands. If it prints, then there is something wrong with your uninstallation.
cd /usr/local/lib ls | grep -e libopencv
2 - Install an optimized OpenCV
Before building OpenCV itself, we must install some base dependencies:
sudo apt update sudo apt upgrade sudo apt install build-essential cmake pkg-config sudo apt install libjpeg-dev libtiff5-dev libpng-dev sudo apt install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev sudo apt install libxvidcore-dev libx264-dev sudo apt install libgtk2.0-dev libgtk-3-dev sudo apt install libatlas-base-dev gfortran
Then install Intel TBB and OpenBLAS via:
sudo apt-get install libtbb-dev sudo apt-get install libopenblas-dev liblapacke-dev
Now clone OpenCV and OpenCV-Contrib (optional):
cd ~ mkdir OpenCV && cd OpenCV wget -O opencv.zip https://github.com/opencv/opencv/archive/4.5.0.zip wget -O opencv_contrib.zip https://github.com/opencv/opencv_contrib/archive/4.5.0.zip unzip opencv.zip unzip opencv_contrib.zip
and finally, run:
cd opencv-4.5.0 mkdir build && cd build cmake -DCMAKE_BUILD_TYPE=RELEASE -DCMAKE_INSTALL_PREFIX=/usr/local -DWITH_TBB=ON -DWITH_LAPACK=ON -DENABLE_VFPV3=ON -DENABLE_NEON=ON -DBUILD_TESTS=OFF -DINSTALL_C_EXAMPLES=OFF -DINSTALL_PYTHON_EXAMPLES=OFF -DBUILD_EXAMPLES=OFF -DOPENCV_EXTRA_MODULES_PATH=~/OpenCV/opencv_contrib-4.5.0/modules .. make -j2 sudo make install sudo ldconfig
The flag –DWITH_TBB enables multi-threading, while the flag -DWITH_LAPACK enables faster matrix operations with OpenBLAS. The –DENABLE_VFPV3=ON and –DENABLE_NEON=ONflags enable OpenCV to use the NEON coprocessor for vectorization. Other flags just turn off building tests and example programs to reduce the overall OpenCV building time.
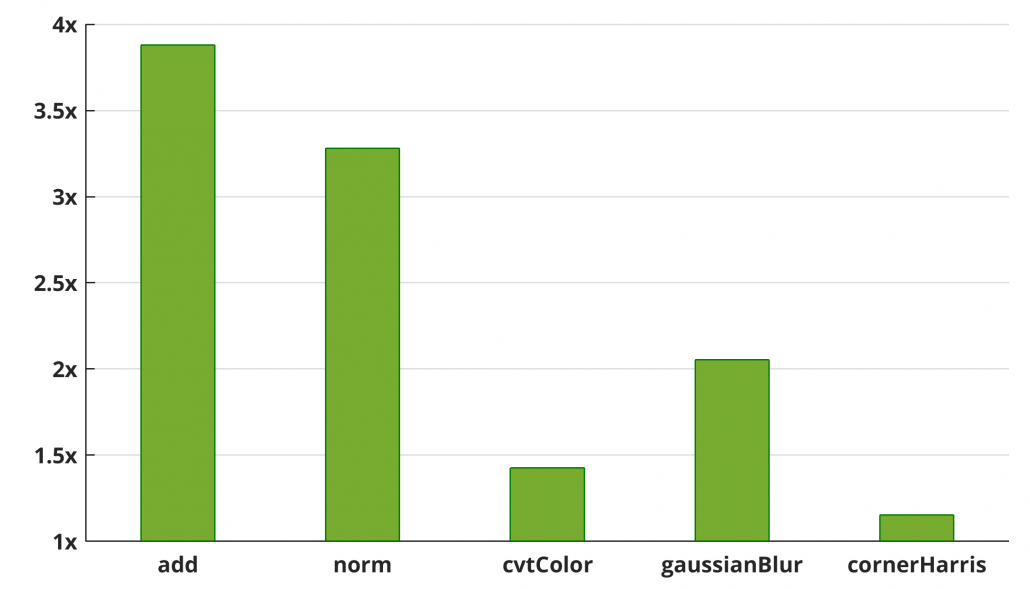
After building, you have an OpenCV that certainly works faster. The following figure shows the boost-up of some of the well-known functions.
3- Notes
- If you are using a 64bit OS on your Pi, then don't set
–DENABLE_VFPV3=ONand–DENABLE_NEON=ON. It throws an error. CMake itself will find the co-processors automatically (tested with OpenCV 4.2.0 on Ubuntu Mate 18). - Although the documents suggest more threading frameworks like OpenMP, pthreads, Concurrency, and GCD, I didn’t experience a multi-threaded OpenCV after setting
–DWITH_OPENMP=ON. - You can also use libjpeg-turbo instead of OpenCV’s default libjpeg library. It uses NEON instructions to boost up Jpeg reading and writing. If you are interested, you must first build it by:
wget https://github.com/libjpeg-turbo/libjpeg-turbo/archive/1.5.0.tar.gz -O libjpeg-turbo.tar.gz tar xvf libjpeg-turbo.tar.gz cd libjpeg-turbo mkdir build autoreconf –fiv cd build sh /configure make -j4 sudo make install
and then add the following statements to your CMake command:
-DWITH_JPEG=ON -DBUILD_JPEG=OFF -DJPEG_INCLUDE_DIR=/opt/libjpeg-turbo/include/ -DJPEG_LIBRARY=/opt/libjpeg-turbo/lib32/libjpeg.a
- The instructions mentioned in this post are not limited to Raspberry Pi. They are applicable to all SBCs equipped with multi-core or newer processors that support Neon technology, including Odroid XU4, BeagleBoard X15, Nvidia Jetson series, etc.
Leave a Reply
Want to join the discussion?Feel free to contribute!
Hi there! Such a wonderful article, thank
you!
Thanks Kenton
Hi,in the image show in this blog “you have an OpenCV that certainly works faster”.My question is how you get this image?
Thank you!
Hi. You can reproduce this image by comparing the runtimes of these functions before and after the optimizations. I used Matlab’s “bar” function to plot the results.
Nice article, attempting to follow the build for ARM VO etc. Kept on failing and realised I needed to increase swap while building opencv
based on: https://www.nerdynat.com/programming/2019/how-to-install-opencv-on-raspberry-pi-3b/
Thank you David for reporting this. I had forgotten to mention swap as a note. Generally, when building big libraries with multiple cores, there is a chance to run out of memory (RAM). In such scenarios, the operating system will kill the build process unless some swap memory is available there. As you may know, swap allows the OS to use the disk space (microSD here) as extra RAM. Obviously, it is too slow compared to RAM but it can at least avoid kills. BTW, make sure to call swapoff after you built OpenCV. I read somewhere that using swap space frequently might damage the microSD.
I am getting the error: “./ARM_VO: error while loading shared libraries: libopencv_gapi.so.405: cannot open shared object file: No such file or directory”
Hi. Please make a new issue in ARM-VO’s Github repo. I will answer there. Thanks
Bro, will this method work for opencv-python too?
Hi Jeva.
opencv-python is just an API that calls the underlying C/C++ functions. So, if the C/C++ functions are optimized, the python calls run faster too.
hi,
i was able to follow the instructions with out errors but in python it keeps saying that cv2 cant be found despite the fact its in the site-packages folder for my specific version of python im using
Hi
This is strange because your site-packages folder is populated with opencv files. After a short search, I found a GitHub issue that might be helpful for you:
https://github.com/opencv/opencv/issues/21471
hi !
i tring to check opencv using script at start of post.
what should go after #include ?
Hi. Unfortunately, my editor removes includes due to some kind of conflict with the website’s tags! The first include is “iostream” and the other one is “opencv2/opencv.hpp”
tried to build on raspberry pi 4 aarch64 but got error:
CMake Error at cmake/OpenCVCompilerOptimizations.cmake:546 (message):
Required baseline optimization is not supported: VFPV3
(CPU_BASELINE_REQUIRE=;VFPV3;NEON)
As explained in section “3-Notes”, there is no need to pass vectorization flags for 64bit operating systems